This gear set implements ABENICS: Active Ball Joint Mechanism With Three-DoF Based on Spherical Gear Meshings active ball joint mechanism.
M3x10 (or M3x8) screws plus M3 nuts - 4 pcs - join 2 parts of the cross-spherical gear
M6x30 screws plus M6 nuts - 2 pcs - as monopole gears axles
M4x16 (or longer) screws plus M4 nuts - 3 pcs - join 2 halves of the case
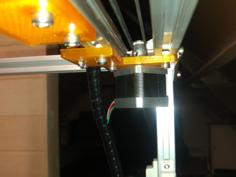
The printed model should rotate by hand. Unfortunately PLA is not great material for this application. Mainly because of high friction. Consider a different filament and/or grease. Try different tolerances
The cross-spherical gear tries to stall in some positions (near polar singularities), until second monopole gear is rotated.
| abenics_gears-case.stl | 824.9KB | |
| abenics_gears-cross_gear_bottom.stl | 1.8MB | |
| abenics_gears-cross_gear_top.stl | 1.8MB | |
| abenics_gears-monogear_mount.stl | 47.3KB | |
| abenics_gears-monopole_gear.stl | 1.2MB | |
| abenics_gears.FCStd | 33.2MB |