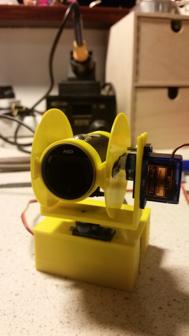
Since I didn't like the manual adjustment of my old night vision telephoto lens camera ( https://www.thingiverse.com/thing:3422950 ), here is my new 9g servo driven version!
The system can still be equipped with an 8x or 12x telephoto lens, and has a pan and tilt control...
I use this system to observe a few magpies (cool birds) on ~ 200m/600feet in their tree...
Features:
- Costs for everything together only (incl. RPI Zero) ~40€/45$
- Completely printable! (Only the screws supplied with the servo and the potentiometers are needed! The rest will be glued completely with superglue or better with 5min epoxy)
- pan/tilt servo driven (~180°/180°)
- Wired remote control (later there will also be a web server)
- RPI 1080p night vision camera module
- RPI Zero W
- 2x very cheap 9g servos
- an Arduino Nano is built in
- 7W IR focusable flashlight built in
- can be plugged in purely with Dupont cables (not recommended for continuous operation)
- will be extended later by a focus option
- all together very cheap
- With a 30-50cm CSI cable also RPI 3 possible
Schematic and INO file added!
Shopping list:
Cam-Rotator:
Cam:
If you need a power supply to provide the 6V: https://www.thingiverse.com/thing:2963121
By the way, the camera in the video is powered by this system: https://www.thingiverse.com/thing:3524121
Have fun, like, and share your makes...
SG
.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-
Da mir das manuelle Einstellen bei meiner alten Nachtsicht Teleobjektiv Kamera nicht gefallen hat ( https://www.thingiverse.com/thing:3422950 ), folgt hier nun meine neue 9g Servo getriebene Version!
Das System kann nach wie vor mit einem 8x oder 12x Teleobjektiv ausgestattet werden, und hat eine pan und tilt Steuerung...
Ich benutze dieses System, um ein paar Elstern (was für coole Vögel) auf ~ 200m/600feet in ihrem Baum zu beobachten.....
Features:
- Kosten für alles zusammen nur (inkl. RPI Zero) ~40€/45$
- Komplett druckbar! (Es werden nur die beim Servo u. den Potis mitgelieferten Schrauben benötigt! Der Rest wird komplett mit Sekundenkleber oder besser mit 5min Epoxy verklebt)
- pan/tilt Servo getrieben (~180° / 180°)
- Kabelgebundene Fernsteuerung (später wird es auch einen Webserver geben)
- RPI 1080p Nachtsicht Kameramodul
- RPI Zero W
- 2x sehr günstige 9g Servos
- ein Arduino Nano verbaut
- kann rein mit Dupont Kabeln gesteckt werden (für Dauerbetrieb nicht empfohlen)
- wird später noch um eine Fokus Option erweitert werden
- alles zusammen sehr günstig
- 7W IR fokussierbare Taschenlampe verbaut
- Mit einem 30-50cm CSI Kabel auch RPI 3 möglich
Schaltplan und INO Datei hinzugefügt!
Einkaufsliste:
Cam-Rotator:
Cam:
Falls ihr eine Stromversorgung benötigt um die 6V bereit zu stellen: https://www.thingiverse.com/thing:2963121
Die Kamera im Video wird übrigens von dieses System mit Strom versorgt: https://www.thingiverse.com/thing:3524121
Habt Spass
SG
https://youtu.be/BWQNUu5PdWE
########################################################################
CODE (there is also a ino file):
########################################################################
/* PAN/TILT CAM Rotator by LTO
Servo servoPAN; // Objekt Servo PAN erstellen
Servo servoTILT; // Objekt Servo Tilt erstellen
int pinPAN = 0; // analoger PIN POTI PAN
int pinTILT = 1; // analoger PIN POTI TILT
int valPAN; // Variable PAN
int valTILT; // Variable TILT
void setup() {
servoPAN.attach(9); // Servo PIN9
servoTILT.attach(10); // Servo PIN10
}
void loop() {
valPAN = analogRead(pinPAN); // Poti auslesen
valTILT = analogRead(pinTILT); // Poti2 auslesen
valPAN = map(valPAN, 0, 1023, 0, 180);
valTILT = map(valTILT, 0, 1023, 0, 180);
servoPAN.write(valPAN); // Servo auf gewünschte Position setzen
servoTILT.write(valTILT);
delay(25);
}
(you have to add a # before include)
########################################################################