6DOF Robotic Arm 3D Printer Model
The file '6DOF Robotic Arm 3D Printer Model' is (STL) file type, size is 1.6MB.
The file '6DOF Robotic Arm 3D Printer Model' is (STL) file type, size is 1.6MB.
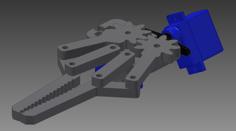
This is a 6DOF robotic manipulator. I worked really hard trying to use the least amount of hardware as possible. It will need 7 HiTec HS-422 servos. I've designed it and built it using these. You will be able to print, attach servos, and begin playing with it. This is kind of an advanced build but very rewarding at the same time. The arm stands approximately 35cm (around 16"). I had to do some light sanding to get the gripper to slide easily. I also adjusted roll and tilt servo mounts to exclude the need for nuts and bolts, only self tapping screws. I found this much easier than having to fight with tiny hardware for mounting servos. Please leave any comments that would help with making this project better and hope you all enjoy and someone else builds it! I posted all of the parts needed if someone wants to rebuild the model like I have. Feel free to contact me if you want the solidworks files. Thanks! ALSO PLEASE TAG ME OR GIVE ME CREDIT IF YOU USE ANY OF THESE PARTS. [email protected]
| 22mmBearing.STL | 58.7KB | |
| Base_Servo_MounT.STL | 413.1KB | |
| Bicep.STL | 1.7MB | |
| GripperLeft.STL | 17.5KB | |
| GripperLink.STL | 21.8KB | |
| GripperPlateGear.STL | 290.1KB | |
| GripperRight.STL | 17.1KB | |
| servoCover.STL | 537.4KB | |
| servo_extension.STL | 396.4KB | |
| Turntable.STL | 594.4KB | |
| wristConnector.STL | 1.4MB | |
| wristGear.STL | 269.2KB |