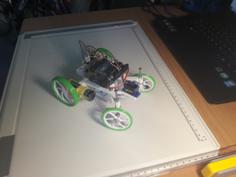
I'm not done with a few of the pieces for this project. I haven't printed the (revised) chassis or it's cover yet. I used Pololu and Servocity hardware. The servo holders are ServoCity's design. I'll post video soon of it running. If anyone decides to try and build it drop me a note and I'll put together a parts list. I'll track changes as I go. The wiring is a mess, I'm not going to finalize it until I print the base. I have basic code to run it using a tablet via the Raspberry P3. I'll post that once it's finalized.
| Bearing_Cover_V2.stl | 82.2KB | |
| Bogie_V3.1.stl | 134.3KB | |
| Bogie_V3.1_mirror.stl | 134.3KB | |
| differential_Chasis_V2.stl | 108.1KB | |
| Fixed_wheel_adapter.stl | 85.6KB | |
| frame.stl | 135.4KB | |
| MotorHouseRearV1.stl | 130.7KB | |
| MotorHousingBodyV1.stl | 142.7KB | |
| motorHousingMotorMountV1.stl | 94.4KB | |
| outerRimv2.stl | 88.6KB | |
| Rimpart_2_v1.stl | 96.1KB | |
| Rocker_V3.stl | 167.7KB | |
| Servo_bearing_Cover.stl | 61.8KB | |
| Servo_Cage_assembled_v1.stl | 324.5KB | |
| steering_arm_v1.stl | 107.0KB | |
| TireV4-1.stl | 2.3MB | |
| TireV4.stl | 2.3MB |