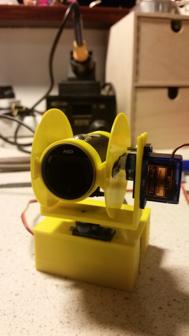
This is a robot platform I built to test machine learning algorithms during my master thesis.
https://www.youtube.com/watch?v=zNXgT2csQ7A&t=
To assemble the cat you also need 8 servo motors, 4 RC car springs, 3x8x3 mm ball bearings and some nut and bolts.
if you would like to modify the design the fusion 360 files are availible at Grabcad:
https://grabcad.com/library/3d-printed-robot-cat-1
Parts I used:
Microcontroller:
Teensy 3.2
Servo PWM control (I2C bus):
PCA9685
Touchscreen:
2.4" SPI TFT LCD
Wireless communication:
HC-12
Ball bearings:
MR83ZZ 3x8x3mm
Motors: (X8)
https://hobbyking.com/en_us/turnigytm-tgy-1501mg-mg-servo-15-5kg-0-16sec-60g.html
Leg springs: (X4)
https://hobbyking.com/en_us/metal-rear-shock-a2031-2pcs.html?___store=en_us
Battery:
https://hobbyking.com/en_us/turnigy-nano-tech-1200mah-2s-15-25c-lipo-airsoft-pack.html
Springs from a ballpoint pen
| BearingRing_X8.stl | 650.0KB | |
| CatRobot_Body_X2.3mf | 146.4KB | |
| CatRobot_Calf_X2.3mf | 435.2KB | |
| CatRobot_Drum_X12.3mf | 290.6KB | |
| CatRobot_KneeDrive_X2.3mf | 362.9KB | |
| CatRobot_ParallelBones_X4.3mf | 292.9KB | |
| Foot_bearing_mount__X8.stl | 200.9KB | |
| Foot_X4.stl | 489.7KB | |
| HalfBody_X2.stl | 387.4KB | |
| Lower_leg_X4.stl | 524.1KB | |
| MidLegBearing_X4.stl | 154.0KB | |
| MidLeg_X12.stl | 187.6KB | |
| MidtLock_X2.stl | 66.1KB | |
| Print_settings.txt | 214.0B | |
| RobotCat_FootParts_X4.3mf | 383.4KB | |
| ServoAdapter_X2.stl | 530.9KB | |
| ServoAdapter__Mirrored_X2.stl | 530.9KB | |
| UpperLeg_X4.stl | 430.2KB |