3D Printed Linear Actuator – Linear Motion 3D Printer Model
The file '3D Printed Linear Actuator – Linear Motion 3D Printer Model' is (stl) file type, size is 4.1MB.
The file '3D Printed Linear Actuator – Linear Motion 3D Printer Model' is (stl) file type, size is 4.1MB.
Video can be found here: https://www.youtube.com/watch?v=NLscbeoIjAY
Source files: https://www.cgtrader.com/3d-print-models/science/engineering/3d-printable-linear-actuator-b78ad144-de5c-4ce5-b99b-1845e9275fa4
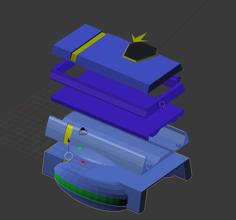
In this project I designed this linear actuator. You know this things provides a linear movement.
First of all I used 775 motor (100 Watt) and I get a cool results. The maximum axial load theoritically 250 Newton. But if you use 775 motor which is one of 150 Watt, this time axial load will theoritically 380 Newton.
The Piston stroke is maximum 120 mm and piston speed about 30 mm/s. So 4 sec to required to full stroke.
There is a small gearbox in the system. It has a 6:1 gear ratio. So the threaded rod rotate 2000 rpm.
I used helical gears and they have m=0.8 mm and m=1 mm normal modules.
The threaded rod is 8 mm diameter. (M8)
Bearings also has a 8mm inner diameter(608zz)
(The body_bottom and body_top does not need to be so strong. Because the body only meets the friction force between the lead screw and the nut. )
Part list
• 775 motor-100W (You should use 150 watt)
• 3-position rocker switch
• M8 threaded rod (l=220mm)
• M6 shaft steel shaft
• 608zz bearing --- x3
• M3x40 screw --- x4
• M3X15 screw --- x12
• M3 washers --- x16
• M3 nuts --- x16
• M4x10 --- x2 (for motor mounting)
• External Retaining Ring (M8) x 2
• External Retaining Ring (M6) x 2
• Cotter pin (M2)
| Bearing_Housing_v3.stl | 284.3KB | |
| Bodie_bottom.stl | 217.7KB | |
| Bodie_top.stl | 209.7KB | |
| Gearbox_cover_v4.stl | 266.9KB | |
| Helical_Gear-pinion_[0.8M_13T_23HA_v2.stl | 2.7MB | |
| Helical_Gear-_[1M_29T_23HA_10FW_v1.stl | 1.5MB | |
| Middle_Gear_v4.stl | 5.1MB | |
| Piston_v11.stl | 387.0KB | |
| Spacer_v4.stl | 164.3KB | |
| Top_Cover_v5.stl | 116.9KB |