3D Printed Braille Display 3D Printer Model
The file '3D Printed Braille Display 3D Printer Model' is (stl,scad) file type, size is 135.6KB.
The file '3D Printed Braille Display 3D Printer Model' is (stl,scad) file type, size is 135.6KB.
Prototype for the UCMerced Capstone team: Team B.R.A.V.E.
(Braille Reader for Assisting the Visually impairEd) in partnership with:
COVE (the Center Of Vision Enhancement) in Merced and
Solidoodle
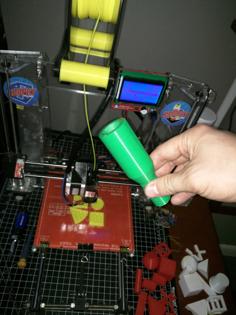
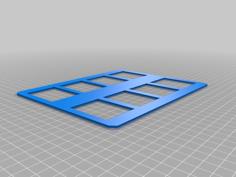
Due to the high cost of current refreshable Braille displays, less than 10% of blind children have the opportunity to learn Braille. To help with this, we have designed an open-source, 3D printed, refreshable Braille display which can be made for less than $200.
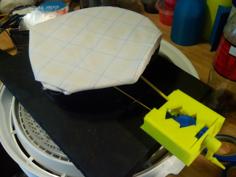
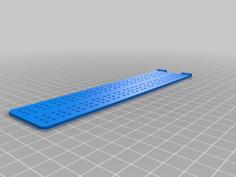
Based on the premise of sliding bars with bumps to raise the dots, the bars are moved by small pager motors with worm gears (such as http://www.robotshop.com/solarbotics-tiny-pager-motor-tpm2.html). An Arduino will control the motors and receive feedback from a small resistive element in the center which will serve as a position sensor.
The current design as posted is fully printable, but only functional manually.
Modifications which still need to be made:
-resistance sensor and contact pocket need to be added. Ideas include printed circuit boards, graphite rods (pencil lead) and ideally a conductive ABS filament (such as http://rainbot3d.com/product_info.php?products_id=71) printed part which would be printed using a dual extrusion printer in-situ.
-Gear system needs to be upgraded. Currently the worm gear direct drive to the bar requires too much torque for the small pager motor. Adding a large spur gear with an axially attached smaller spur gear to reduce the required torque may be necessary. Alternatively, a motor with more torque such as (http://www.robotshop.com/solarbotics-gm15-gear-motor.html) may work.
Our Teams Mission Statement is:
To leverage advances in materials research and manufacturing to reduce the cost and complexity of Refreshable Braille Displays to promote greater literacy in the blind and visually impaired community.
Design is fully parametric in OpenSCAD (although there are some issues with using the scale feature at the moment, to be fixed in the future).
Original idea for control mechanism from:
http://www.kscitech.com/BBT/Slider_diagram1.jpg
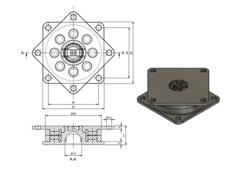
8/31/13 Update:
Added a sketch of a modified design incorporating a dual spur gear to improve the gearing of the mechanism. I have been in the process of moving to graduate school so have not had a chance to update the openSCAD design with this yet, but will soon, as well as improving compatibility with customizer.
6/29/14 Update:
Found some interesting new motors on AliExpress and Ebay. They are 6mm and 7mm diameter stepper motors, and some even come with linear actuators using a threaded rod.
http://www.aliexpress.com/item/NEW-10pcs-Japan-Nidec-Mini-stepper-motor-micro-stepper-motor-2-phase-4-wire-D6mm-stepping/1612405669.html
http://www.ebay.com/itm/5PCS-Canon-4-Wire-2-Phase-micro-stepper-motor-D7xH4mm-with-a-small-division-bar/221438951346?_trksid=p2047675.c100005.m1851&_trkparms=aid%3D222007%26algo%3DSIC.MBE%26ao%3D1%26asc%3D20131003132420%26meid%3D7975608331830605768%26pid%3D100005%26prg%3D20131003132420%26rk%3D5%26rkt%3D6%26sd%3D181414292588&rt=nc
| bar.stl | 28.4KB | |
| base.stl | 59.3KB | |
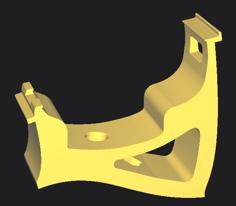
| Full_Chassis.stl | 76.3KB | |
| Motor_Mount.stl | 17.9KB | |
| Parametric_Braille_Printed_Cell.scad | 11.5KB | |
| Pins.stl | 229.8KB | |
| Worm_Gear.stl | 62.9KB |