3D Printable Electric Gripper SSG48 3D Printer Model
The file '3D Printable Electric Gripper SSG48 3D Printer Model' is (STL) file type, size is 21.9MB.
The file '3D Printable Electric Gripper SSG48 3D Printer Model' is (STL) file type, size is 21.9MB.
The most up-to-date STL files can be found: https://github.com/PCrnjak/SSG-48-adaptive-electric-gripper/tree/main/Gripper%20STL%20parts
Github repo with SSG48 Files and building instructions: Link Assembly manual: https://github.com/PCrnjak/SSG-48-adaptive-electric-gripper
Github repo with GUI: https://github.com/PCrnjak/SSG-gripper-GUI
Documentation: https://source-robotics.github.io/SSG48-gripper-docs/page1_about_the_gripper/
https://www.youtube.com/watch?v=DQgi8Ua-VAU
https://www.youtube.com/watch?v=XMgTk6tdKVQ
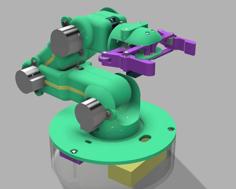
SSG-48 adaptive electric gripper is a gripper based on Spectral micro BLDC drivers. It is a gripper capable of controlling its gripping force, making it perfect for assembly tasks and human-robot collaboration. Force can be adjusted from 5 N to 80N allowing you to grasp a wide range of items; from delicate and soft to rigid and sturdy.
Mechanical files are open source allowing you to add a custom griping tool and attach it to any robotic arm or robot. Gripper software is also open-source. Gripper has a stroke of 48 mm and a mass of 400g.
Join Discord: https://discord.com/invite/prjUvjmGpZ
Join forum: https://discourse.source-robotics.com
Follow us on Instagram, Youtube, or Twitter!
| connector_coupler_generic.STL | 7.3MB | |
| connector_coupler_PAROL6.STL | 6.8MB | |
| gripper_gear.STL | 2.6MB | |
| Guide_cover.STL | 992.1KB | |
| Jaw.STL | 1.7MB | |
| Magnet_shaft.STL | 632.9KB | |
| Mainbody.STL | 21.6MB | |
| Main_body_lid.STL | 17.5MB |