Robot minisumo de hasta 500gr, utiliza motores microgear N20 de 500rpm con ruedas SolarBotics RW2i, sensores de infrarrojos TCRT5000 para el suelo y Sharp GP2Y0A51SK0F para el rival, controlador de motores L9110s, un Arduino Nano y un regulador de voltaje MT3608 ajustado a 7,5V.
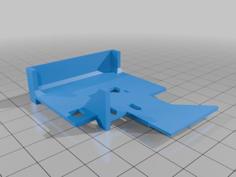
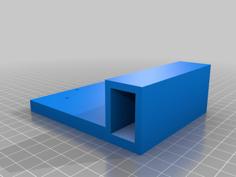
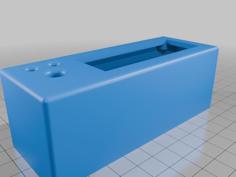
Imprimir el molde para crear uno de arena y usar esta para fundir una pieza de plomo que formaría el chasis del robot, posteriormente se vuelve a imprimir el molde pero sólo la parte exterior, usando este para envolver la pieza de plomo (Ultimaker Cura -> Opciones especiales -> Espiralizar.
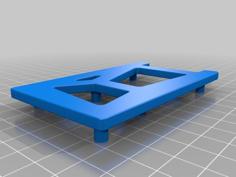
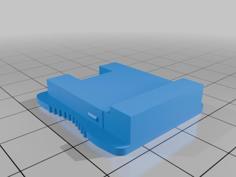
Añadimos cinta aislante o kapton para aislar el plomo, añadimos la circuitería y soldamos todo, finalmente imprimimos la cubierta y se la ponemos (se recomienda lijar el borde de ataque).
Código en:
https://github.com/KpBots/2-Koi
| Cubierta_sumo.stl | 66.1KB | |
| Molde_2koi.stl | 29.5KB |